Hauptinhalt
Abschlussarbeiten LS4 Robotik, Simulation, Digitaler Zwilling
Abschlussarbeiten im Bereich Robotik, Simulation und Digitaler Zwilling
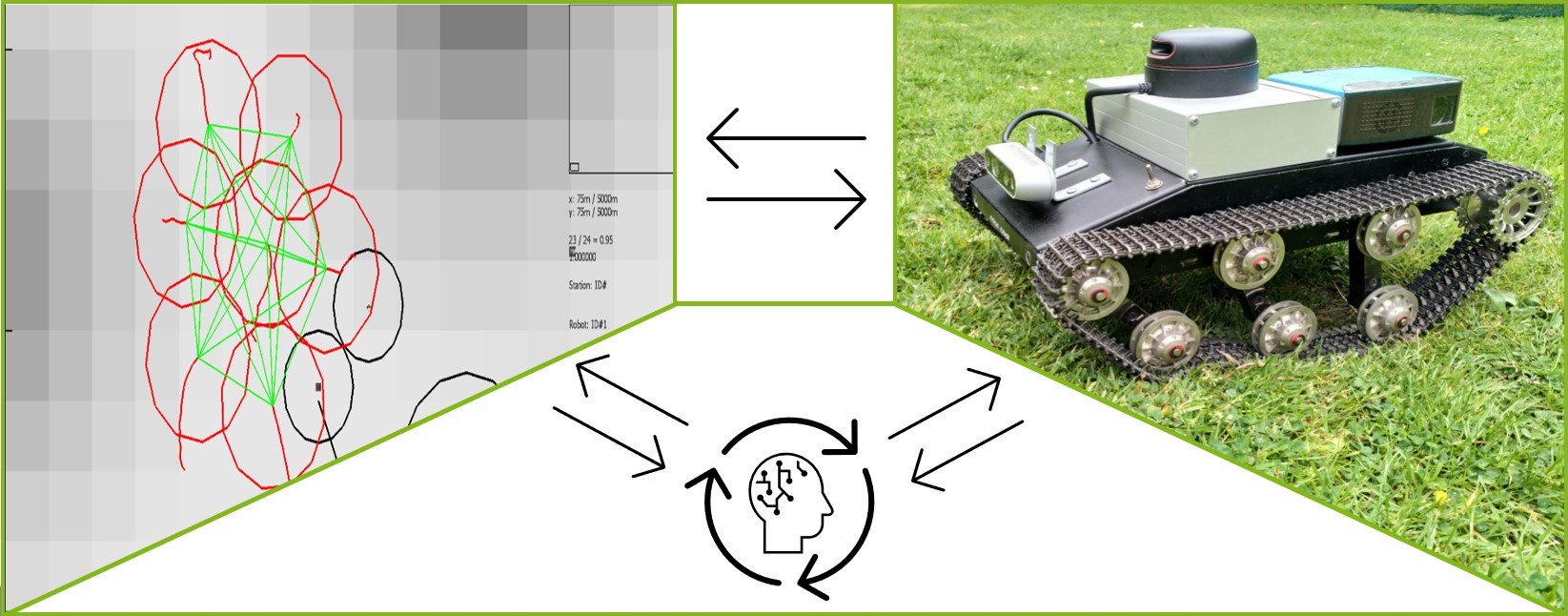
Der Lehrstuhl besitzt in diesem Bereich sowohl eine bereits in Echtzeit laufende Simulation von große Roboterschwärmen (mehr als 60 Agenten möglich) als auch reale Roboter für den Outdoor-Bereich. In dem Forschungsbereich von Herrn Puzicha geht es darum, diese Aspekte miteinander zu verschmelzen.
Das bedeutet, dass weitere reale Komponenten mit Hilfe von übertragenen Echtzeitdaten simuliert werden müssen und simulierte Daten das Verhalten der Roboter steuern müssen.
Aktuelle Themen:
6) Entwicklung von Co-Simulationsmechanismen mit ROS und Einbindung realer Roboter als digitale Zwillinge sowie Emulation simulierter Daten. [Bevorzugt als Masterarbeit auf Deutsch oder Englisch] (MasterThesisROS.pdf)
7) Parallelisierung von Regelungsalgorithmen auf GPUs (GPU.pdf)
10) Weiterentwicklung eines realen Mobile Ad Hoc Netzwerks auf LoRa Basis und dynamisches Routing in dynamischen Netzwerken.
11) Entwicklung von Kompressionsalgorithmen für Netzwerke mit geringer Banbreite und hoher Reichweite.
12) Echtzeit Schnitttestreduktion für Hindernisvermeidung (Spieletechnologie, Octrees, Hierarchische Gitter). [In Kooperation mit LS7 Graphische Systeme]
14) Literaturarbeit im Bereich der Trajektorienplanung und Missionsverarbeitung.
15) Globale Pfadplanung im komplexen Umfeld (A* oder andere Planungsalgorithmen für kontinuierliche Räume).
16) Entwicklung einer VR-Nutzerinteraktion für digitale Zwillinge mobiler Roboter. [In Kooperation mit LS7 Graphische Systeme]
17) Theoretische Komplexitätsanalyse verschiedener Reglersysteme
18) Entwicklung und Durchführung von Benchmarktests für Open Motion Planning Library (OMPL) und CPBP
19) Fertigstellung realer Outdoor-Roboter
20) Erforschung eines IMU und GPS basierten Drifterkkenungssystems und Bestimmung einer driftreduzierten Konfiguration redundanter Sensoren.
21) Lokalisation von Entitäten (Gaswolken, Schallwellenortung) mit Hilfe eines Roboterschwarms. (#mce_temp_url#)
Bei eigenen Ideen können Sie mich ebenfalls gerne kontaktieren.
Die Arbeiten können je nach Umfang als BA-/MA-Arbeiten bearbeitet werden. Masterarbeiten werden auf Deutsch oder Englisch angeboten.
Ansprechpartner und redaktionell verantwortlich: M.Sc. Alexander Puzicha, Wiss. Mitarbeiter
Zurzeit sind hier keine Informationen vorhanden.